20 KiB
Executable File
| author | date | title | tags | uuid | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Alvie Rahman | \today | MMME1048 // Fluid Dynamics |
|
b88f78f8-a358-460b-9dbb-812e7b1ace92 |
\newcommand\Rey{\mbox{\text{Re}}} \newcommand\textRey{$\Rey$}
Introductory Concepts
These are ideas you need to know about to know what's going on, I guess?
Control Volumes
A control volume is a volume with an imaginary boundary to make it easier to analyse the flow of a fluid. The boundary is drawn where the properties and conditions of the fluid is known, or where an approximation can be made. Properties which may be know include:
- Velocity
- Pressure
- Temperature
- Viscosity
The region in the control volume is analysed in terms of energy and mass flows entering and leaving the control volumes. You don't have to understand what's going on inside the control volume.
Example 1
The thrust of a jet engine on an aircraft at rest can be analysed in terms of the changes in
momentum or the air passing through the engine.

The control volume is drawn far enough in front of the engine that the air velocity entering can be assumed to be at atmospheric pressure and its velocity negligible.
At the exit of the engine the boundary is drawn close where the velocity is known and the air pressure atmospheric.
The control volume cuts the material attaching the engine to the aircraft and there will be a force transmitted across the control volume there to oppose the forces on the engine created by thrust and gravity.
The details of the flows inside the control volume do not need to be known as the thrust can be determined in terms of forces and flows crossing the boundaries drawn. However, to understand the flows inside the engine in more detail, a more detailed analysis would be required.
Ideal Fluid
The actual flow pattern in a fluid is usually complex and difficult to model but it can be simplified by assuming the fluid is ideal. The ideal fluid has the following properties:
- Zero viscosity
- Incompressible
- Zero surface tension
- Does not change phases
Gases and vapours are compressible so can only be analysed as ideal fluids when flow velocities are low but they can often be treated as ideal (or perfect) gases, in which case the ideal gas equations apply.
Steady Flow
Steady flow is a flow which has no changes in properties with respect to time. Properties may vary from place to place but in the same place the properties must not change in the control volume to be steady flow.
Unsteady flow does change with respect to time.
Uniform Flow
Uniform flow is when all properties are the same at all points at any given instant but can change with respect to time, like the opposite of steady flow.
One Dimensional Flow
In one dimensional (1D) flow it is assumed that all properties are uniform over any plane perpendicular to the direction of flow (e.g. all points along the cross section of a pipe have identical properties).
This means properties can only flow in one direction---usually the direction of flow.
1D flow is never achieved exactly in practice as when a fluid flows along a pipe, the velocity at the wall is 0, and maximum in the centre of the pipe. Despite this, assuming flow is 1D simplifies the analysis and often is accurate enough.
Flow Patterns
There are multiple ways to visualize flow patterns.
Streamlines
A streamline is a line along which all the particle have, at a given instant, velocity vectors which are tangential to the line.
Therefore there is no component of velocity of a streamline.
A particle can never cross a streamline and streamlines never cross.
They can be constructed mathematically and are often shown as output from CFD analysis.
For a steady flow there are no changes with respect to time so the streamline pattern does not. The pattern does change when in unsteady flow.
Streamlines in uniform flow must be straight and parallel. They must be parallel as if they are not, then different points will have different directions and therefore different velocities. Same reasoning with if they are not parallel.
Pathlines
A pathline shows the route taken by a single particle during a given time interval. It is equivalent to a high exposure photograph which traces the movement of the particle marked. You could track pathlines with a drop of injected dye or inserting a buoyant solid particle which has the same density as the solid.
Pathlines may cross.
Streaklines
A streakline joins, at any given time, all particles that have passed through a given point. Examples of this are line dye or a smoke stream which is produced from a continuous supply.
Viscous (Real) Fluids
Viscosity
A fluid offers resistance to motion due to its viscosity or internal friction. The greater the resistance to flow, the greater the viscosity.
Higher viscosity also reduces the rate of shear deformation between layers for a given shear stress.
Viscosity comes from two effects:
- In liquids, the inter-molecular forces act as drag between layers of fluid moving at different velocities
- In gases, the mixing of faster and slower moving fluid causes friction due to momentum transfer. The slower layers tend to slow down the faster ones
Newton's Law of Viscosity
Viscosity can be defined in terms of rate of shear or velocity gradient.

Consider the flow in the pipe above.
Fluid in contact with the surface has a velocity of 0 because the surface irregularities trap the
fluid particles.
A short distance away from the surface the velocity is low but in the middle of the pipe the
velocity is v_F.
Let the velocity at a distance y be v and at a distance y + \delta y be v + \delta v.
The ratio \frac{\delta v}{\delta y} is the average velocity gradient over the distance
\delta y.
But as \delta y tends to zero, \frac{\delta v}{\delta y} \rightarrow the value of the
differential \frac{\mathrm{d}v}{\mathrm{d}y} at a point such as point A.
For most fluids in engineering it is found that the shear stress, \tau, is directly proportional
to the velocity gradient when straight and parallel flow is involved:
\tau = \mu\frac{\mathrm{d}v}{\mathrm{d}y}Where \mu is the constant of proportionality and known as the dynamic viscosity, or simply the
viscosity of the fluid.
This is Newton's Law of Viscosity and fluids that obey it are known as Newtonian fluids.
Viscosity and Lubrication
Where a fluid is a thin film (such as in lubricating flows), the velocity gradient can be approximated to be linear and an estimate of shear stress obtained:
\tau = \mu \frac{\delta v}{\delta y} \approx \mu \frac{v}{y}From the shear stress we can calculate the force exerted by a film by the relationship:
\tau = \frac F AFluid Flow
Types of flow
There are essentially two types of flow:
-
Smooth (laminar) flow
At low flow rates, particles of fluid are moving in straight lines and can be considered to be moving in layers or laminae.
-
Rough (turbulent) flow
At higher flow rates, the paths of the individual fluid particles are not straight but disorderly resulting in mixing taking place
Between fully laminar and fully turbulent flows is a transition region.
The Reynolds Number
Development of the Reynolds Number
In laminar flow the most influential factor is the magnitude of the viscous forces:
viscous\, forces \propto \mu\frac v l l^2 = \mu vlwhere v is a characteristic velocity and l is a characteristic length.
In turbulent flow viscous effects are not significant but inertia effects (mixing, momentum
exchange, acceleration of fluid mass) are.
Inertial forces can be represented by F = ma
\begin{align*} m &\propto \rho l^3 \ a &= \frac{dv}{dt} \ &\therefore a \propto \frac v t \text{ and } t = \frac l v \ &\therefore a \propto \frac {v^2} l \ &\therefore \text{Interial forces} \propto \rho l^2\frac{v^2} l = \rho l^2v^2 \end{align*}
The ratio of internal forces to viscous forces is called the Reynolds number and is abbreviated to Re:
\Rey = \frac{\text{interial forces}}{\text{viscous forces}} = \frac {\rho l^2v^2}{\mu vl} = \frac {\rho vl} \muwhere \rho and \mu are fluid properties and v and l are characteristic velocity and length.
- During laminar flow,
\Reyis small as viscous forces dominate. - During turbulent flow,
\Reyis large as inertial forces dominate.
\textRey is a non dimensional group. It has no units because the units cancel out.
Non dimensional groups are very important in fluid mechanics and need to be considered when scaling experiments.
If \textRey is the same in two different pipes, the flow will be the same regardless of actual diameters, densities, or other properties.
\textRey for a Circular Section Pipe
The characteristic length for pipe flow is the diameter d and the characteristic velocity is
mean flow in the pipe, v, so \textRey of a circular pipe section is given by:
\Rey = \frac{\rho vd} \muFor flow in a smooth circular pipe under normal engineering conditions the following can be assumed:
\Rey < 2000--- laminar flow2000 < \Rey < 4000--- transition\Rey > 4000--- fully turbulent flow
These figures can be significantly affected by surface roughness so flow may be turbulent below
\Rey = 4000.
Euler's Equation
In a static fluid, pressure only depends on density and elevation. In a moving fluid the pressure is also related to acceleration, viscosity, and shaft work done on or by the fluid.
\frac 1 \rho \frac{\delta p}{\delta s} + g\frac{\delta z}{\delta s} + v\frac{\delta v}{\delta s} = 0Assumptions / Conditions
The Euler equation applies where the following can be assumed:
- Steady flow
- The fluid is inviscid
- No shaft work
- Flow along a streamline
Bernoulli's Equation
Euler's equation comes in differential form, which is difficult to apply. We can integrate it to make it easier
\begin{align*} \frac 1 \rho \frac{\delta p}{\delta s} + g\frac{\delta z}{\delta s} + v\frac{\delta v}{\delta s} &= 0 & \text{(Euler's equation)} \ \int\left{\frac{\mathrm{d}p} \rho + g\mathrm{d}z + v\mathrm{d}v \right} &= \int 0 ,\mathrm{d}s \ \therefore \int \frac 1 \rho ,\mathrm{d}p + g\int \mathrm{d}z + \int v ,\mathrm{d}v &= \int 0 ,\mathrm{d}s \ \therefore \int \frac 1 \rho ,\mathrm{d}p + gz + \frac{v^2}{2} &= \text{constant}_1 \end{align*}
The first term of the equation can only be integrated if \rho is constant as then:
\int \frac 1 \rho \,\mathrm{d}p = \frac 1 \rho \int \mathrm{d}p = \frac p \rhoSo, if density is constant:
\frac p \rho + gz + \frac{v^2}{2} = \text{constant}_2Assumptions / Conditions
All the assumptions from Euler's equation apply:
- Steady flow
- The fluid is inviscid
- No shaft work
- Flow along a streamline
But also one more:
- Incompressible flow
Forms of Bernoulli's Equation
Energy Form
This form of Bernoulli's Equation is known as the energy form as each component has the units energy/unit mass:
\frac p \rho + gz + \frac{v^2}{2} = \text{constant}_2It is split into 3 parts:
- Pressure energy (
\frac p \rho) --- energy needed to move the flow against the pressure (flow work) - Potential energy (
gz) --- elevation - Kinetic energy (
\frac{v^2}{2}) --- kinetic energy
Elevation / Head Form
Divide the energy form by g:
\frac p {\rho g} + z + \frac{v^2}{2g} = H_Twhere H_T is constant and:
-
\frac{p}{\rho g}--- static/pressure head -
z--- elevation head -
\frac{v_2}{2g}--- dynamic/velocity head -
H_T--- total head -
Each term now has units of elevations
-
In fluids the elevation is sometimes called head
-
This form of the equation is also useful in some applications
Pressure Form
Multiply the energy form by \rho to give the pressure form:
p + \rho gz + \frac 1 2 \rho v^2 = \text{constant}where:
-
p--- static pressure (often written asp_s) -
\rho gz--- elevation pressure -
\frac 1 2 \rho v^2--- dynamic pressure -
Density is constant
-
Each term now has the units of pressure
-
This form is useful is we are interested in pressures
Comparing two forms of the Bernoulli Equation (Piezometric)
\text{piezometric} = \text{static} + \text{elevation}Pressure form:
\begin{align*} p_s + \rho gz + \frac 1 2 \rho v^2 &= \text{total pressure} \ p_s + \rho gz &= \text{piezometric pressure} \end{align*}
Head form:
\begin{align*} \frac{p_s}{\rho g} + z + \frac{v^2}{2g} &= \text{total head} \ \frac{p_s}{\rho g} + z &= \text{piezometric head} \end{align*}
Steady Flow Energy Equation (SFEE) and the Extended Bernoulli Equation (EBE)
SFEE is a more general equation that can be applied to any fluid and also is also takes heat energy into account. This is useful in applications such as a fan heater, jet engines, ICEs, and steam turbines.
The equation deals with 3 types of energy transfer:
- Thermal energy transfer (e.g. heat transfer from central heating to a room)
- Work energy transfer (e.g. shaft from car engine that turns wheels)
- Energy transfer in fluid flows (e.g. heat energy in a flow, potential energy in a flow, kinetic energy in a flow)
Derivation of Steady Flow Energy Equation
Consider a control volume with steady flows in and out and steady transfers of work and heat.
The properties don't change with time at any any location and are considered uniform over inlet and
outlet areas A_1 and A_2.
For steady flow, the mass, m, of the fluid within the control volume and the total energy, E,
must be constant.
E includes all forms for energy but we only consider internal, kinetic, and potential energy.
Consider a small time interval \delta t.
During \delta t, mass \delta m_1 enters the control volume and \delta m_2 leaves:

The specific energy e_1 of fluid \delta m_1 is the sum of the specific internal energy, specific
kinetic energy, and specific potential energy:
e_1 = u_1 + \frac{v_1^2}{2} gz_1e_2 = u_2 + \frac{v_2^2}{2} gz_2Since the mass is constant in the control volume, \delta m_1 = \delta m_2.
Applying the First Law of Thermodynamics
The control volume is a system for which \delta E_1 is added and \delta E_2 is removed::
\delta E = \delta E_2 - \delta E_1E is constant so applying the
first law of thermodynamics
we know that:
\delta Q + \delta W = \delta EWe can also say that:
\delta E = \delta E_2 - \delta E_1 = \delta m(e_2 - e_1)The Work Term
The work term, \delta W, is made up of shaft work and the work necessary to deform the system
(by adding \delta m_1 at the inlet and removing \delta m_2 at the outlet):
\delta W = \delta W_s + \text{net flow work}Work is done on the system by the mass entering and by the system on the mass leaving.
For example, at the inlet:

\text{work done on system} = \text{force} \times \text{distance} = p_1A_1\delta x = p_1\delta V_1Knowing this, we can write:
\delta W = \delta W_s + (p_1\delta V_1 - p_2\delta V_2)Back to the First Law
Substituting these equations:
\delta E = \delta E_2 - \delta E_1 = \delta m(e_2 - e_1)\delta W = \delta W_s + (p_1\delta V_1 - p_2\delta V_2)into:
\delta Q + \delta W = \delta Egives us:
\delta Q + \left[ \delta W_s + (p_1\delta V_1 - p_2\delta V_2)\right] = \delta m (e_2-e_1)Dividing everything by \delta m and with a bit of rearranging we get:
q + w_s = e_2-e_1 + \frac{p_2}{\rho_2} - \frac{p_1}{\rho_1}Substitute Back for e
e = u + \frac{v^2}{2} + gzThis gives us:
q + w_s + \left[ u_2 + \frac{p_2}{\rho_2} + gz_2 + \frac{v_2^2}{2} \right] - \left[ u_1 + \frac{p_1}{\rho_1} + gz_1 + \frac{v_1^2}{2} \right]Rearrange and Substitute for Enthalpy
By definition, enthalpy h = u + pv = u + \frac p \rho.
This gives us the equation:
q + w_s = (h_2 - h_1) + g(z_2-z_1) + \frac{v_2^2-v_1^2}{2}This equation is in specific energy form.
Multiplying by mass flow rate will give you the power form.
Application of the Steady Flow Energy Equation
Heat Transfer Devices
Like heat exchangers, boilers, condensers, and furnaces.
In this case, \dot W = 0, \delta z ~ 0, and \delta v^2 ~ 0 so the equation can be simplified
to just
\dot Q = \dot m(h_2-h_1) = \dot m c_p(T_2-T_1)Throttle Valve
No heat and work transfer. Often you can neglect potential and kinetic energy terms, giving you:
0 = h_2-h_1)Work Transfer Devices
e.g. Turbines, Pumps, Fans, and Compressors
For these there is often no heat transfer (\dot Q = 0) and we can neglect potential
(\delta z ~ 0) and kinetic (\delta v^2 ~ 0) energy terms, giving us the equation
\dot W = \dot m (h_2-h_1) = \dot m c_p(T_2-T_1)Mixing Devices
e.g. Hot and cold water in a shower
In these processes, work and heat transfers are not important and you can often neglect potential and kinetic energy terms, giving us the same equation as for the throttle valve earlier:
0 = h_2-h_1which you may want to write more usefully as:
\sum \dot m h_{out} = \sum \dot m h_{in}SFEE for Incompressible Fluids and Extended Bernoulli Equation
\frac{w_s}{g} = H_{T2} - H_{T1} + \left[ \frac{(u_2-u_1)-1}{g}\ \right]or
w_s = g(H_{T2}-H_{T1}+H_fIf we assume shaft work, w_s, is 0, then we can get this equation:
H_{T1}-H_{T2} = H_fThis is very similar to the Bernoulli equation. The difference is that it considers friction so it can be applied to real fluids, not just ideal ones. It is called the Extended Bernoulli Equation.
The assumptions remain:
- Steady flow
- No shaft work
- Incompressible
H_f for Straight Pipes
H_f = \frac{4fL}{D} \frac{v^2}{2g}\Delta p = \rho g H_f \text{ (pressure form)}This equation applies to long, round and straight pipes. It applies to both laminar and turbulent flow.
However be aware that in North America the equation is:
H_f = f \frac{L}{D} \frac{v^2}{2g}Their f (the Darcy Friction Factor) is four times our f (Fanning Friction Factor).
In mainland Europe, they use \lambda = 4f_{Fanning}, which is probably the least confusing version
to use.
Finding f
f for Laminar Flow
f = \frac{16}{\Rey}f for Turbulent Flow
For turbulent flow, the value defends on relative pipe roughness (k' = \frac k d) and Reynolds
number.
Note when calculating k' that both k and d are measured in mm for some reason.
A Moody Chart is used to find f:

Hydraulic Diameter
D_h = \frac{4 \times \text{duct area}}{\text{perimeter}}Loss Factor K
There are many parts of the pipe where losses can occur.
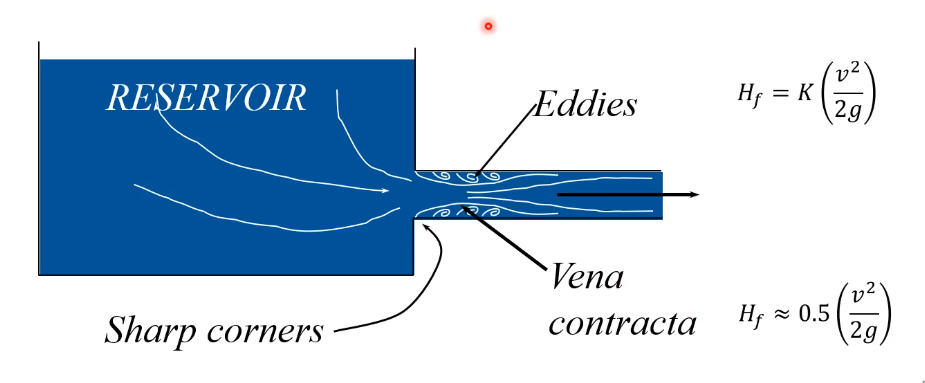
It is convenient to represent these losses in terms of loss factor, K, times the velocity head:
H_f = K \frac{v^2}{g}Most manufacturers include loss factors in their data sheets.
Loss Factor of Entry
Loss Factor of Expansion
K = \left( \frac{A_2}{A_1} - 1\right)^2This also tells us the loss factor on exit is basically 1.
For conical expansions, K ~ 0.08 (15 degrees cone angle),
K ~ 0.25 (30 degrees).
For cones you use the inlet velocity.
Loss Factor of Contraction
\frac{d_2}{d_1} |
K |
|---|---|
| 0 | 0.5 |
| 0.2 | 0.45 |
| 0.4 | 0.38 |
| 0.6 | 0.28 |
| 0.8 | 0.14 |
| 1.0 | 0 |
Loss Factor of Pipe Bends
On a sharp bend, K ~ 0.9.
On a bend with a radius, K ~ 0.16-0.35.
Loss Factor of Nozzle
K ~ 0.05But you use the outlet velocity, increasing losses.